
 Гидроприводы роботов
Гидроприводы роботов
В роботах грузоподъемностью более 40 кг., как правило, используются гидравлические приводы.
К достоинствам гидроприводов относятся:
плавное бесступенчатое регулирование скоростей выходного звена;
широкий диапазон регулирования (отношение максимально достижимой скорости движения выходного звена к минимальной);
быстродействие и высокая точность отработки сигналов управления, а также легкость реверсирования;
высокий коэффициент усиления мощности;
передача самых больших мощностей при малых габаритах и массе;
высокая жесткость нагрузочной (механической) характеристики, т.е. стабильность скорости выходных звеньев при изменении величины и знака нагрузки;
простота преобразования одного вида движения в другой, особенно характерная для гидроцилиндров (обеспечивают поступательное движение охвата робота без передаточных механизмов).
У гидроприводов есть и недостатки:
зависимость характеристик гидропривода от изменения температуры жидкости из-за изменения ее вязкости;
относительно высокая стоимость (по сравнению с другими приводами) вследствие высоких требований к точности изготовления и монтажа;
сложность эксплуатации.
Принципиальная схема гидропривода зависит от способа управления движением выходного элемента. Управлять движением можно путем изменения производительности насоса (количества рабочей жидкости, подаваемой насосом в единицу времени), а также при помощи гидравлической аппаратуры. Гидроприводы, у которых частота вращения вала гидромотора или скорость перемещения штока гидроцилиндра регулируется за счет изменения производительности насоса, называются гидроприводами с объемным управлением. Гидроприводы, у которых регулирование скорости выходного элемента происходит при помощи дросселирования потока жидкости в гидроаппаратуре, называются гидроприводами с дроссельным управлением.
Отличительной чертой гидроприводов с объемным управлением является применение в качестве силовых исполнительных элементов объемных гидродвигателей. Состав гидропривода представлен на рис. 3.2.

Рис. 3.2. Состав гидропривода робота с объемным управлением
Насос создает напорный поток рабочей жидкости, преобразуя механическую энергию двигателя в гидравлическую. Гидродвигатели преобразует энергию жидкости в механическую энергию выходных звеньев привода. Объемные гидродвигатели могут быть выполнены в виде цилиндров с поршнем для прямолинейного перемещения выходного звена - штока поршня или в виде гидромоторов, в которых энергия подводящей жидкости преобразуется в механическую энергию вращающегося вала (конструкция гидромотора аналогична конструкции насоса), или в виде гидромотора поворотного типа, где выходное звено - вал - совершает ограниченное поворотное движение.
С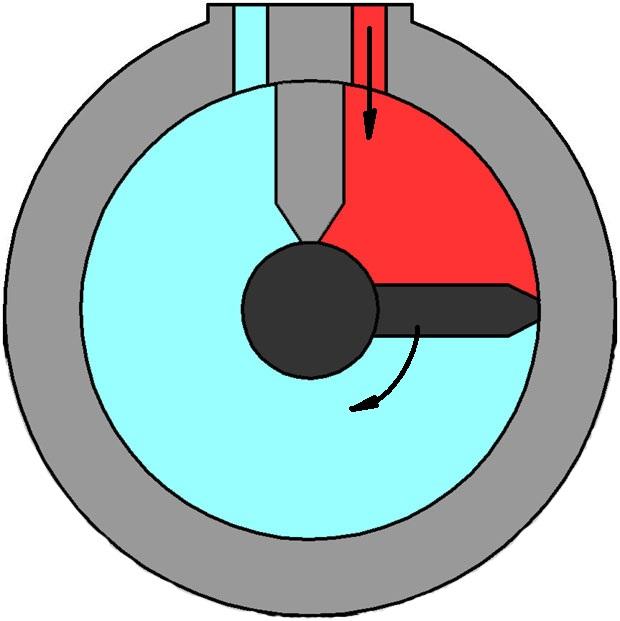 хемалопастной гидродвигателя поворотного типа представлена на рис . 3.3
хемалопастной гидродвигателя поворотного типа представлена на рис . 3.3
Рис. 3.3. Роторный лопастной гидродвигатель поворотного типа
Гидродвигатель поворотного типа предназначен для обеспечения вращения менее чем на один оборот. Механизм состоит обычно из одной лопасти, закрепленной на центральном валу радиально и вращающейся внутри корпуса под действием давления жидкости, подаваемой в камеру двигателя.
В гидромоторе - насосе, схема которого представлена на рис. 3.4., ряд подпружиненных лопастей размещен на роторе на конце выходного вала.
гидромоторе - насосе, схема которого представлена на рис. 3.4., ряд подпружиненных лопастей размещен на роторе на конце выходного вала.
Рис. 3.4. Лопастной мотор-насос
Ротор расположен эксцентрично внутри цилиндрического корпуса. Таким образом, подпружиненные лопасти выталкиваются, образуют ряд камер. По мере вращения ротора заданная камера будет изменять размеры, практически сходя на нет в месте, где ротор ближе всего подходит к корпусу. При таком размещении масло, толкая лопасти и ротор, может пройти сквозь мотор через большие камеры.
Передача рабочей жидкости от одного гидроустройства привода к другому осуществляется по системам сообщения - гидролиниям или трубопроводам. Системы сообщения снабжаются гидроаппаратурой (клапаны, дроссели, распределители), предназначенной для изменения направления и параметров потока рабочей жидкости. Качественное состояние рабочей жидкости обеспечивают кондиционеры, к которым относятся фильтры, теплообменные аппараты (охладители или нагреватели) и воздуховыпускные устройства. Основные характеристики объемного гидропривода - давление и расход рабочей жидкости, а также его мощность.
Однако наибольшее распространение в робототехнике получили гидроприводы с дроссельным управлением, которые обладают высоким быстродействием и малыми массово - габаритными характеристиками.
На рис. 3.5. представлена схема электрогидравлической следящей системы исполнительного привода с дроссельным управлением.
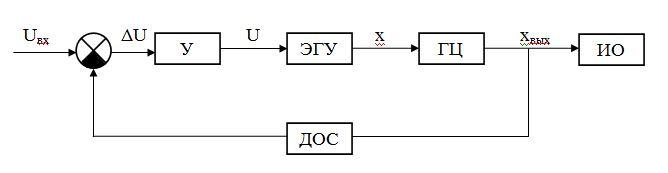
Рис. 3.5. Схема электрогидравлической следящей системы
исполнительного привода
Данная система предназначена для осуществления поступательных движений исполнительного органа ПР в соответствии с программой, поступающей на привод в виде электрических сигналов Uвх от задающего устройства. Мощность управляющего сигналаU сформированного электронным усилителемУ, недостаточна для непосредственного воздействия на орган управления. Для получения нужного управляющего сигнала применяются гидравлические усилители. Они предназначены для управления потоком жидкости, поступающей в гидравлический цилиндр ГЦ. Мощность управляемого потока жидкости много больше мощности управляющего сигнала. В качестве гидроусилителей в гидроприводе используются золотники, струйные трубки, распределители типа «сопло – заслонка» и др. Гидроусилителем обычно управляет электромагнитный элемент (электромагнит втяжного или поворотного типа), входом для которого является управляющий сигнал. Совокупность двух элементов в этом случае называют электрогидравлическим усилителем. Датчики обратной связи измеряют и преобразуют выходную координатуХвых(движение штока) в электрический сигналUос, который сравнивается с управляющим сигналомUвх. Uвх–Uос=0 означает, что ГП совершил необходимое движение на заданную величину.
